



Можно ли собрать робота самостоятельно?
Роботом называется автоматизированная машина, которая способна выполнять различные действия. В случае с самодельным роботом достаточно и того, что машина просто передвигается.
Облегчить сборку помогут подручные средства: телефонная трубка, пластиковая бутылка или тарелка, зубная щетка, старый фотоаппарат или компьютерная мышь.
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Вибрирующий жучок
Как сделать маленького робота? В домашних условиях можно изготовить наипростейший вариант вибрирующего жучка. Необходимо запастись следующими материалами:
- мотором от старой детской машинки;
- литиевой батарейкой серии CR-2032, похожей на таблетку;
- держателем для этой самой таблетки;
- скрепками;
- изолентой;
- паяльником;
- светодиодом.
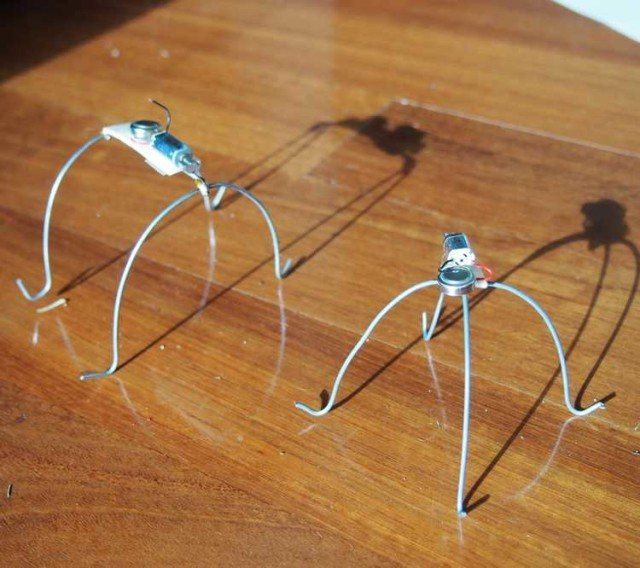
Сначала необходимо обмотать светодиод изолентой, оставив при этом свободные кончики. Паяльником спаиваем один светодиодный конец с задней стенкой держателя для батарейки. Оставшийся кончик спаиваем с контактом моторчика от машинки. Скрепки будут служить лапками для вибрирующего жучка. Проводки от держателя для батарейки соединяются с проводами моторчика. Жучок будет вибрировать и двигаться после контакта держателя с самой батарейкой.
Робот-пылесос (home-версия)
Этот виброробот, способный постепенно, но тщательно убирать помещение, конструируется на основе простой щетки. Составляющими элементами будут служить вибродвигатель, стандартная батарея и переключатель. Сборка осуществляется следующим образом: к батарее подключаем двигатель, а к нему – переключатель.
Получившуюся конструкцию крепим на щетку и включаем – домашний робот вибрирует и таким образом чистит поверхность.
Щеткабот — детская забава
Итак, как сделать мини-робота в домашних условиях? Забавную машину можно собрать из подручных материалов, таких как зубная щетка (головка), двусторонний скотч и вибромоторчик от старого мобильника. Достаточно приклеить моторчик к головке щетки, и все — робот готов.
Электропитание появится благодаря плоской батарейке. Для дистанционного управления придется что-нибудь придумать.

Смотрите про коптеры: Работа в Канаде для русских: вакансии, зарплата и трудоустройство
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Картонный робот
Как сделать робота в домашних условиях, если его требует ребенок? Можно придумать интересную игрушку из простого картона.
Необходимо запастись:
- двумя картонными коробками;
- 20 крышками от пластиковых бутылок;
- проволокой;
- скотчем.
Бывает, что папа хочет смастерить этакую диковину для малыша, но в голову не приходит ничего толкового. Поэтому можно подумать, как сделать настоящего робота в домашних условиях.
Для начала необходимо использовать коробку в качестве туловища для робота и вырезать у нее дно. Затем нужно сделать 5 отверстий: под голову, для рук и ног. В коробке, предназначенной для головы, нужно сделать одно отверстие, которое поможет соединить ее с туловищем. Для скрепления частей робота используется проволока.
После присоединения головы нужно подумать, как сделать руку робота в домашних условиях. Для этого в боковые отверстия просовывается проволока, на которую надеваются пластиковые крышки. Получаем подвижные руки. Так же поступаем и с ногами. Сделать отверстия в крышках можно шилом.
Для устойчивости картонного робота необходимо пристальное внимание уделить срезам. Именно они придают игрушке хороший внешний вид. Сложно соединить все части при неправильной линии среза.
Если вы решили склеить между собой коробки, то не переусердствуйте с количеством клея. Лучше пользоваться прочным картоном или бумагой.
Изготовление робота
Теперь, вы выбрали все основные компоненты для сборки робота. Изготовление робота начинается со следующего шага — необходимо спроектировать и построить основание или каркас. Каркас держит их всех вместе и придает вашему роботу законченный вид и форму.

сборка робота
Простейший робот
Как сделать легкого робота в домашних условиях? Сложно создать полноценную автоматизированную машину, а вот минимальную конструкцию собрать все-таки можно. Рассмотрим простейший механизм, который, к примеру, сможет совершать определенные действия в одной зоне. Понадобятся следующие материалы:
- Пластиковая тарелка.
- Пара щеток среднего размера для чистки обуви.
- Компьютерные вентиляторы в количестве двух штук.
- Разъем для батарейки 9-в и сама батарея.
- Хомут и стяжка с функцией защелкивания.
- Гайки.
Смотрите про коптеры: Игры Роботы – играть онлайн бесплатно
Просверливаем в тарелке для щеток два отверстия с одинаковым расстоянием. Крепим их. Щетки должны располагаться на одинаковом расстоянии от друг друга и середины тарелки. С помощью гаек прикрепляем к щеткам регулировочное крепление. В среднее расположение устанавливаем ползунки от креплений. Для движений робота необходимо использовать компьютерные вентиляторы.
В данном случае не потребуется больших финансовых затрат или какого-либо технического или компьютерного опыта, ведь здесь подробно описано, как сделать робота в домашних условиях. Достать необходимые детали нетрудно. Для улучшения двигательных функций конструкции можно использовать микроконтроллеры или дополнительные моторчики.
Создаем робота в домашних условиях
Наверняка, насмотревшись фильмов про роботов, тебе не раз хотелось построить своего боевого товарища, но ты не знал с чего начать. Конечно, у тебя не получится построить двуногого терминатора, но мы и не стремимся к этому. Собрать простого робота может любой, кто умеет правильно держать паяльник в руках и для этого не нужно глубоких знаний, хотя они и не помешают. Любительское роботостроение мало чем отличается от схемотехники, только гораздо интереснее, потому что тут так же затронуты такие области, как механика и программирование. Все компоненты легкодоступны и стоят не так уж и дорого. Так что прогресс не стоит на месте, и мы будем его использовать в свою пользу.
Введение
Итак. Что же такое робот? В большинстве случаев это автоматическое устройство, которое реагирует на какие-либо действия окружающей среды. Роботы могут управляться человеком или выполнять заранее запрограммированные действия. Обычно на роботе располагают разнообразные датчики (расстояния, угла поворота, ускорения), видеокамеры, манипуляторы. Электронная часть робота состоит из микроконтроллера (МК) – микросхема, в которую заключён процессор, тактовый генератор, различная периферия, оперативная и постоянная память. В мире существует огромное количество разнообразных микроконтроллеров для разных областей применения и на их основе можно собирать мощных роботов. Для любительских построек широкое применение нашли микроконтроллеры AVR. Они, на сегодняшний день, самые доступные и в интернете можно найти много примеров на основе этих МК. Чтобы работать с микроконтроллерами тебе нужно уметь программировать на ассемблере или на Cи и иметь начальные знания в цифровой и аналоговой электронике. В нашем проекте мы будем использовать Cи. Программирование для МК мало чем отличается от программирования на компьютере, синтаксис языка такой же, большинство функций практически ничем не отличаются, а новые довольно легко освоить и ими удобно пользоваться.
Что нам нужно
Для начала наш робот будет уметь просто объезжать препятствия, то есть повторять нормальное поведение большинства животных в природе. Всё что нам потребуется для постройки такого робота можно будет найти в радиотехнических магазинах. Решим, как наш робот будет передвигаться. Самым удачным я считаю гусеницы, которые применяются в танках, это наиболее удобное решение, потому что гусеницы имеют большую проходимость, чем колёса машины и ими удобнее управлять (для поворота достаточно вращать гусеницы в разные стороны). Поэтому тебе понадобится любой игрушечный танк, у которого гусеницы вращаются независимо друг от друга, такой можно купить в любом магазине игрушек по разумной цене. От этого танка тебе понадобится только платформа с гусеницами и моторы с редукторами, остальное ты можешь смело открутить и выкинуть. Так же нам потребуется микроконтроллер, мой выбор пал на ATmega16 – у него достаточно портов для подключения датчиков и периферии и вообще он довольно удобный. Ещё тебе потребуется закупить немного радиодеталей, паяльник, мультиметр.
Делаем плату с МК
Схема робота В нашем случае микроконтроллер будет выполнять функции мозга, но начнём мы не с него, а с питания мозга робота. Правильное питание – залог здоровья, поэтому мы начнём с того, как правильно кормить нашего робота, потому что на этом обычно ошибаются начинающие роботостроители. А для того, чтобы наш робот работал нормально нужно использовать стабилизатор напряжения. Я предпочитаю микросхему L7805 – она предназначена, чтобы на выходе выдавать стабильное напряжение 5В, которое и нужно нашему микроконтроллеру. Но из-за того, что падение напряжения на этой микросхеме составляет порядка 2,5В к нему нужно подавать минимум 7,5В. Вместе с этим стабилизатором используются электролитические конденсаторы, чтобы сгладить пульсации напряжения и в цепь обязательно включают диод, для защиты от переполюсовки. Теперь мы можем заняться нашим микроконтроллером. Корпус у МК — DIP (так удобнее паять) и имеет сорок выводов. На борту имеется АЦП, ШИМ, USART и много другого, что мы пока использовать не будем. Рассмотрим несколько важных узлов. Вывод RESET (9-ая нога МК) подтянут резистором R1 к «плюсу» источника питания – это нужно делать обязательно! Иначе твой МК может непреднамеренно сбрасываться или, проще говоря – глючить. Так же желательной мерой, но не обязательной является подключение RESET’а через керамический конденсатор C1 к «земле». На схеме ты так же можешь увидеть электролит на 1000 мкФ, он спасает от провалов напряжения при работе двигателей, что тоже благоприятно скажется на работе микроконтроллера. Кварцевый резонатор X1 и конденсаторы C2, C3 нужно располагать как можно ближе к выводам XTAL1 и XTAL2. О том, как прошивать МК, я рассказывать не буду, так как об этом можно прочитать в интернете. Писать программу мы будем на Cи, в качестве среды программирования я выбрал CodeVisionAVR. Это довольно удобная среда и полезна новичкам, потому что имеет встроенный мастер создания кода.

Плата моего робота
Управление двигателями
Не менее важным компонентом в нашем роботе является драйвер двигателей, который облегчает нам задачу в управлении им. Никогда и ни в коем случае нельзя подключать двигатели напрямую к МК! Вообще мощными нагрузками нельзя управлять с микроконтроллера напрямую, иначе он сгорит. Пользуйтесь ключевыми транзисторами. Для нашего случая есть специальная микросхема – L293D. В подобных несложных проектах всегда старайтесь использовать именно эту микросхему с индексом «D», так как она имеет встроенные диоды для защиты от перегрузок. Этой микросхемой очень легко управлять и её просто достать в радиотехнических магазинах. Она выпускается в двух корпусах DIP и SOIC. Мы будем использовать в корпусе DIP из-за удобства монтажа на плате. L293D имеет раздельное питание двигателей и логики. Поэтому саму микросхему мы будем питать от стабилизатора (вход VSS), а двигатели напрямую от аккумуляторов (вход VS). L293D выдерживает нагрузку 600 мА на каждый канал, а этих каналов у неё два, то есть к одной микросхеме можно подключить два двигателя. Но, чтобы перестраховаться, мы объединим каналы, и тогда потребуется по одной микре на каждый двигатель. Отсюда следует, что L293D сможет выдержать 1.2 А. Чтобы этого добиться нужно объединить ноги микры, как показано на схеме. Микросхема работает следующим образом: когда на IN1 и IN2 подаётся логический «0», а на IN3 и IN4 логическая единица, то двигатель вращается в одну сторону, а если инвертировать сигналы – подать логический ноль, тогда двигатель начнёт вращаться в другую сторону. Выводы EN1 и EN2 отвечают за включение каждого канала. Их мы соединяем и подключаем к «плюсу» питания от стабилизатора. Так как микросхема греется во время работы, а установка радиаторов проблематична на этот тип корпуса, то отвод тепла обеспечивается ногами GND — их лучше распаивать на широкой контактной площадке. Вот и всё, что на первое время тебе нужно знать о драйверах двигателей.
Датчики препятствий
Чтобы наш робот мог ориентироваться и не врезался во всё, мы установим на него два инфракрасных датчика. Самый простейший датчик состоит из ик-диода, который излучает в инфракрасном спектре и фототранзистор, который будет принимать сигнал с ик-диода. Принцип такой: когда перед датчиком нет преграды, то ик-лучи не попадают на фототранзистор и он не открывается. Если перед датчиком препятствие, тогда лучи от него отражаются и попадают на транзистор – он открывается и начинает течь ток. Недостаток таких датчиков в том, что они могут по-разному реагировать на различные поверхности и не защищены от помех — от посторонних сигналов других устройств датчик, случайно, может сработать. От помех может защитить модулирование сигнала, но пока мы этим заморачиватся не будем. Для начала, и этого хватит.
Первый вариант датчиков моего робота
Прошивка робота
Следующие строки условные, потому что значения PORTC зависят от того, как ты подключил драйвер двигателей к своему микроконтроллеру:
PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 1; PORTC.3 = 0;
Значение 0xFF означает, что на выходе будет лог. «1», а 0x00 – лог. «0».
Следующей конструкцией мы проверяем, есть ли перед роботом препятствие и с какой оно стороны:
if (!(PINB & (1< { … }

Если на фототранзистор попадает свет от ик-диода, то на ноге микроконтроллера устанавливается лог. «0» и робот начинает движение назад, чтобы отъехать от препятствия, потом разворачивается, чтобы снова не столкнуться с преградой и затем опять едет вперёд. Так как у нас два датчика, то мы проверяем наличие преграды два раза – справа и слева и потому можем узнать с какой стороны препятствие. Команда «delay_ms(1000)» указывает на то, что пройдёт одна секунда, прежде чем начнёт выполняться следующая команда.
Заключение
Я рассмотрел большинство аспектов, которые помогут тебе собрать твоего первого робота. Но на этом робототехника не заканчивается. Если ты соберёшь этого робота, то у тебя появится куча возможностей для его расширения. Можно усовершенствовать алгоритм робота, как например, что делать, если препятствие не с какой-то стороны, а прямо перед роботом. Так же не помешает установить энкодер – простое устройство, которое поможет точно располагать и знать расположение твоего робота в пространстве. Для наглядности возможна установка цветного или монохромного дисплея, который может показывать полезную информацию – уровень заряда аккумулятора, расстояние до препятствия, различную отладочную информацию. Не помешает и усовершенствование датчиков – установка TSOP (это ик-приёмники, которые воспринимают сигнал только определённой частоты) вместо обычных фототранзисторов. Помимо инфракрасных датчиков существуют ультразвуковые, стоят подороже, и тоже не лишены недостатков, но в последнее время набирают популярность у роботостроителей. Для того, чтобы робот мог реагировать на звук, было бы неплохо установить микрофоны с усилителем. Но по-настоящему интересным, я считаю, установка камеры и программирование на её основе машинного зрения. Есть набор специальных библиотек OpenCV, с помощью которых можно запрограммировать распознавание лиц, движения по цветным маякам и много всего интересного. Всё зависит только от твоей фантазии и умений.
Список компонентов:
- ATmega16 в корпусе DIP-40>
- L7805 в корпусе TO-220
- L293D в корпусе DIP-16 х2 шт.
- резисторы мощностью 0,25 Вт номиналами: 10 кОм х1 шт., 220 Ом х4 шт.
- конденсаторы керамические: 0.1 мкФ, 1 мкФ, 22 пФ
- конденсаторы электролитические: 1000 мкФ х 16 В, 220 мкФ х 16В х2 шт.
- диод 1N4001 или 1N4004
- кварцевый резонатор на 16 МГц
- ИК-диоды: подойдут любые в количестве двух штук.
- фототранзисторы, тоже любые, но реагирующие только на длину волны ик-лучей
Код прошивки:
#include #include
void main(void) { //Настраиваем порты на вход //Через эти порты мы получаем сигналы от датчиков DDRB=0x00; //Включаем подтягивающие резисторы PORTB=0xFF;
//Настраиваем порты на выход //Через эти порты мы управляем двигателями DDRC=0xFF;
//Главный цикл программы. Здесь мы считываем значения с датчиков //и управляем двигателями while (1) { //Едем вперёд PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 1; PORTC.3 = 0; if (!(PINB & (1< { //Едем назад 1 секунду PORTC.0 = 0; PORTC.1 = 1; PORTC.2 = 0; PORTC.3 = 1; delay_ms(1000); //Заворачиваем PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 0; PORTC.3 = 1; delay_ms(1000); } if (!(PINB & (1< { //Едем назад 1 секунду PORTC.0 = 0; PORTC.1 = 1; PORTC.2 = 0; PORTC.3 = 1; delay_ms(1000); //Заворачиваем PORTC.0 = 0; PORTC.1 = 1; PORTC.2 = 1; PORTC.3 = 0; delay_ms(1000); } }; }
О моём роботе
В данный момент мой робот практически завершён.
UPD.
Перезалил фотографии и сделал небольшие поправки в тексте.
Статья была опубликована мною в журнале «Хакер» за август 2009 года.
Робот, как в рекламе
Наверно, многим знаком рекламный ролик браузера, в котором главным героем является небольшой робот, крутящийся и рисующий фломастерами фигуры на бумаге. Как сделать робота в домашних условиях из этой рекламы? Да очень просто. Для создания такой автоматизированной милой игрушки необходимо запастись:
- тремя фломастерами;
- плотным картоном или пластиком;
- моторчиком;
- круглой батарейкой;
- фольгой или изолентой;
- клеем.
Итак, создаем форму для робота из пластика или картона (точнее, вырезаем). Необходимо сделать треугольную форму с закругленными углами. В каждом уголке проделываем небольшое отверстие, в которое сможет пролезть фломастер. Одно отверстие делаем вблизи центра треугольника для моторчика. Получаем 4 отверстия по всему периметру треугольной формы.
Затем вставляем по очереди фломастеры в проделанные отверстия. К моторчику необходимо прикрепить батарейку. Сделать это можно с помощью клея и фольги или изоленты. Для того чтобы моторчик крепко держался на роботе, необходимо зафиксировать его небольшим количеством клея.
Робот будет двигаться лишь после присоединения второго проводка к закрепленной батарейке.
Описание
Это агрегат с искусственным интеллектом, предназначение которого – автоматическая уборка помещений. Современное устройство зачастую имеет форму диска диаметром около 30 и высотой 10 см. Передняя часть робота оборудована большим контактным сенсором (бампером), который помогает ему избегать столкновений с препятствиями. Работает такой помощник на внутренних аккумуляторах, а подзаряжается от базы (специальный модуль), которую сам находит и подключается после выполнения уборки. Заряжается он от двух до пяти часов в зависимости от типа используемого аккумулятора.
Домашний робот в процессе уборки автономно движется по поверхности, собирая мусор по пути. С помощью специальных алгоритмов он решает, как преодолеть встретившееся препятствие. Благодаря небольшой высоте этот «умный» пылесос легко проходит под кроватью или другой мебелью. Если он все же застрянет и не сможет двигаться, то звуковыми сигналами известит об этом хозяина.
Мягкая игрушка-робот
Отличный подарок ребёнку или работа для детского конкурса поделок.
Возьмите флис или фетр и вырезайте детали квадратной формы:
- Первая для туловища – четыре с половиной сантиметра, три с половиной сантиметра – для шитья головы робота, ноги сшейте из квадратов размером два сантиметра, полтора сантиметра – для рук.
- Шесть квадратов нужно для того, чтобы изготовить одну часть тела.
- Каждый выкроенный элемент необходимо прошить так, чтобы получилась деталь кубической формы.
- До того, как вы прошили деталь полностью, набейте её ватой или синтепоном. Далее сшивайте все детали, собирая робота.
- Глазки можно сделать, пришив бусины, также можете украсить игрушку, пришив бантик, вышив ресницы.
- Если игрушка будет маленького размера, можете выполнить её в виде магнита или брелка.
Робот из «Лего»
«Лего» — серия игрушек для детей, которая состоит в основном из деталей конструктора, соединяющихся в один элемент. Детали можно комбинировать, при этом создавая все новые и новые предметы для игр.
Собирать подобный конструктор любят практически все дети от 3 до 10 лет. В особенности детский интерес увеличивается, если из деталей можно собрать робота. Итак, чтобы собрать двигающиегося робота из «Лего», необходимо приготовить детали, а также миниатюрный мотор и блок управления.
К тому же сейчас продаются готовые наборы с деталями, позволяющие собрать самостоятельно любого робота. Главное — освоить приложенную инструкцию. К примеру:
- готовим детали, как указано в инструкции;
- прикручиваем колеса, если они есть;
- собираем крепления, которые будут служить поддержкой для моторчика;
- вставляем в специальный блок батарейку или даже несколько;
- устанавливаем двигатель;
- подключаем его к мотору;
- загружаем в память конструкции специальную программу, которая позволяет управлять игрушкой.
Казалось бы, робота собрать довольно сложно, а уж человеку без определенных знаний это вообще не удастся. Но это не так. Конечно трудно соорудить полноценную автоматизированную машину, но простейший вариант сделать может каждый. Достаточно прочитать нашу статью о том, как сделать робота в домашних условиях.
Что такое робот
Так называют автоматические устройства, которые действуют, стараясь копировать принцип движений живых организмов. Они могут осуществлять различные операции, которые были предусмотрительно реализованы с помощью аппаратной составляющей и программного обеспечения. Получение информации о внешнем мире осуществляется с помощью датчиков, выступающих в роли органов чувств, что присущи живым организмам. При этом может присутствовать связь с оператором и возможность обработки его команд. Их внешний вид не привязан к единому стандарту. Так, в производстве используются роботы, которые по причинам экономического и технического характера далеки от человека. Данный термин может быть использован и относительно программного обеспечения, например, с приставкой «поисковый» или в качестве объекта игры – «бот».
Аппликация робот
Очень простая поделка, с изготовлением которой легко справятся даже дети младшего возраста.
- Нужно прорисовать , а затем вырезать геометрические фигурки, которые будут необходимы для создания изображения.
- Это могут быть круги, прямоугольники, квадраты – всё, что пожелает нарисовать ваш ребёнок.
- Затем возьмите клей-карандаш либо клей ПВА и приклеивайте заготовки на бумагу.
- Должно получиться оригинальное изображение робота.
- Дорисуйте по желанию фон, прорисуйте маркером детали изображения.
Это упражнение отлично развивает мелкую моторику ребёнка, а также цветовосприятие, аккуратность и воображение.
Бумажный робот
Для того, чтобы изготовить поделку робот из бумаги и картона, составьте схему будущего изделия. Также вам не обойтись без бумаги, ножниц, иголки или шила и клея. Для того, чтобы конструкция была устойчивой, потребуется картон.
Для соединения элементов возьмите резинки, а для декора робота приготовьте фломастеры.
Бижутерия робот
Если вы любите оригинальную бижутерию – вам отлично подойдут серьги в виде роботов, выполненные своими руками.
- Для этого понадобится минимум материалов – только проволока и крупные бусины.
- Сначала вам необходимо разрезать проволоку на несколько частей.
- Скручивайте проволоку в спирали – они должны быть достаточно плотными. Для этого накручивайте проволоку на стержень.
- Проволока, четыре спиральки, а также две бусины – это набор элементов, из которых вы сформируете головку робота.
- Кончик проволоки проденьте в бусину и разогните, чтобы сформировать ручки. Одна рука – это пара спиралек, а также четыре бусины маленького размера.
- После того, как вы сложили ручки, переходите к изготовлению туловища и ног. Кончик проволоки продевается в бусину.
- Нога – это пара спиралек а также бусинка маленького размера. Вторая серёжка выполняется аналогично.
- Итак, стильная и необычная бижутерия готова!
Следуя всем этим советам, вы легко изготовите множество интересных поделок. Среди них будут и украшения для интерьера, и поделки в школу либо в детский сад, и даже интересные дизайнерские серьги.
А главное, у вас появится возможность организовать совместный досуг для всей семьи.
Робот-мойщик окон
Пожалуй, самая сложная конструкция. Здесь кроме очевидной необходимости двигателя необходимо также позаботиться о том, чтобы устройство могло передвигаться вертикально. Для управления всем процессом необходимо будет прибегнуть к помощи микроконтроллеров. Для облегчения конструкции можно пользоваться не батареей, а подсоединять робота к сети питания. В качестве чистильного устройства можно использовать маленький двигатель, который будет постоянно передвигать по кругу или в две стороны чистильный элемент. Для крепления конструкции можно использовать маленькие присоски, которые будут достаточно хороши, чтобы удерживать робота, но не будут останавливать его движения (как у геккона).



